중국산 6축 1800mm 암 도달 거리 자동 강철 MIG 용접 로봇 팔




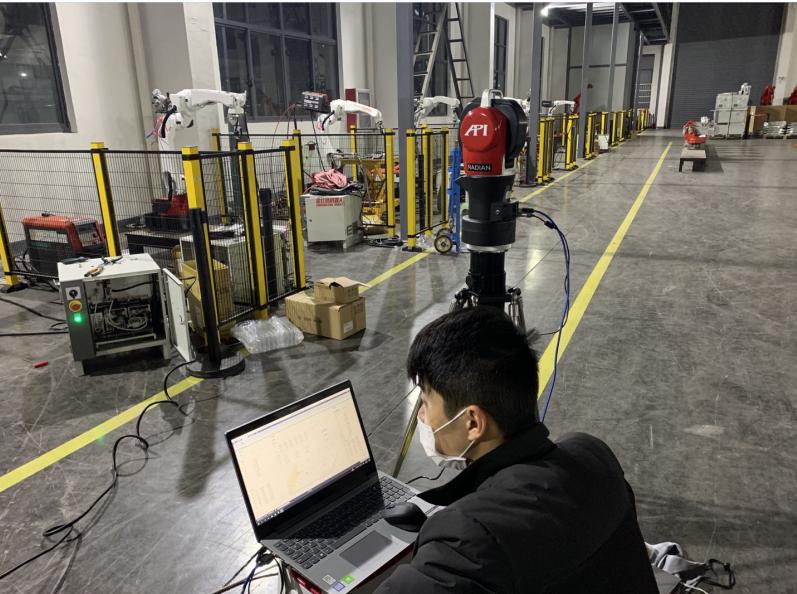
레이저 교정 테스트 위치 재조정 정확도
JHY는 레이저 교정 방식을 사용하여 로봇의 반복 위치 정확도를 테스트합니다. 여러 차례 테스트를 거친 결과, 당사 로봇의 반복 위치 정확도는 ±0.08mm보다 훨씬 높은 것으로 나타났습니다.

핵심 액세서리는 유명 브랜드 제품을 사용하세요.
서보 모터, RV 감속기, 하모닉 감속기, 서보 드라이브 등 로봇 핵심 부품은 모두 중국 최고 브랜드 제품을 사용하며, 장기간 사용을 통해 로봇에 적합한지 검증했습니다.


간편한 유지보수
유지보수는 간단합니다. 저희가 제공하는 유지보수 안내서를 참고하시면 고객께서 직접 쉽게 작동하실 수 있습니다.
판매 후 보증
모든 고객에게는 전담 사후 서비스 팀이 배정되어 있습니다. 사후 지원이 필요하시면 언제든지 문의해 주세요. 저희 전문 엔지니어들이 최대한 빠른 시간 내에 문제를 해결해 드리겠습니다. 무엇보다 이 모든 서비스는 무료입니다.

| 연강 및 저합금강의 용접 매개변수 참조 | |||||||||
| 유형 | 그릇 | 와이어 직경 | 뿌리 간격 | 용접 전류 | 용접 전압 | 용접 속도 | 접촉 팁과 공작물 사이의 거리 | 가스 흐름 | 용접 각도 |
| T자형 맞대기 용접
| 1.0 | 0.8 | 2.5~3 | 70~80 | 17~18세 | 8~10 | 10 | 10~15 | 45도 |
| 1.2 | 1.0 | 3~3.5 | 85~90 | 18~19세 | 8~10 | 10 | 10~15 | 45도 | |
| 1.6 | 1.0,1.2 | 3~3.5 | 100~110 | 18~19.5세 | 8~10 | 10 | 10~15 | 45도 | |
| 2.0 | 1.0,1.2 | 3~3.5 | 115~125 | 19.5~20 | 8~10 | 10 | 10~15 | 45도 | |
| 2.3 | 1.0,1.2 | 3~3.5 | 130~140 | 19.5~21 | 8~10 | 10 | 10~15 | 45도 | |
| 3.2 | 1.0,1.2 | 3.5~4 | 150~170 | 21~22 | 7.5~8 | 15 | 15~20 | 45도 | |
| 4.5 | 1.0,1.2 | 4.5~5 | 180~220 | 21~23세 | 6.5~7.5 | 15 | 15~20 | 45도 | |
| 1.2 | 5~5.5 | 200~250개 | 24~26일 | 6.5~8 | 10~15 | 10~20 | 45도 | ||
| 6 | 1.2 | 5~5.5 | 230~260 | 25~27세 | 6.5~7.5 | 20 | 15~20 | 45도 | |
| 6 | 220~250 | 25~27세 | 5.5~7.5 | 13~18세 | 10~20 | 45도 | |||
| 4~4.5 | 270~300 | 28~31일 | 10~11.5 | 13~18세 | 10~20 | 45도 | |||
| 8,9 | 1.2,1.6 | 6~7 | 270~380 | 29~35세 | 6.5~7.5 | 25 | 20~25세 | 50도 | |
| 8 | 1.2 | 5~6개 | 270~300 | 28~31일 | 9~10 | 13~18세 | 10~20 | 45도 | |
| 1.2 | 7~8 | 260~300 | 26~32세 | 4~5.5 | 15~20 | 10~20 | 50도 | ||
| 1.6 | 6.5~7 | 300~330 | 30~34세 | 5~5.5 | 15~20 | 10~20 | 50도 | ||
| 12 | 1.2,1.6 | 7~8 | 270~380 | 27~35세 | 4.5~6.5 | 20~25세 | 20~25세 | 50도 | |
| 1.2 | 7~8 | 260~300 | 26~32세 | 4~5.5 | 15~20 | 10~20 | 50도 | ||
| 1.6 | 6.5~7 | 300~330 | 30~34세 | 5~6개 | 15~20 | 10~20 | 50도 | ||

메모:
1. MIG 용접은 불활성 가스를 사용하며, 주로 알루미늄 및 그 합금, 구리 및 그 합금, 티타늄 및 그 합금, 스테인리스강 및 내열강 용접에 사용됩니다. MAG 용접과 CO2 가스 차폐 용접은 주로 탄소강 및 저합금 고강도강 용접에 사용됩니다.
2. 위의 내용은 참고용이며, 최적의 용접 공정 매개변수는 실험을 통해 검증하는 것이 가장 좋습니다. 위의 와이어 직경은 실제 모델을 기준으로 합니다.


